Der Miniatur-Hexapod H-811 von Physik Instrumente (PI) ist mit einem Durchmesser von nur 130 mm und einer Höhe von 115 mm sehr kompakt gebaut. Zusätzlich zur Vakuumausführung ist er jetzt auch als Luftvariante verfügbar.
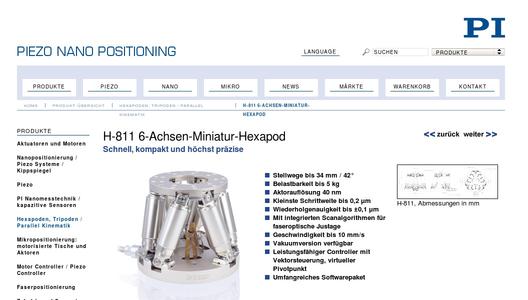
Der H-811 bietet Stellwege bis zu 35 mm in der XY-Ebene und bis zu 13 mm in Z-Richtung. Insbesondere die großen Kippwinkel von 20° um X- und Y-Achse und bis zu 40° um die Senkrechte machen diesen Hexapod so vielseitig. Der Mini-Hexapod positioniert zuverlässig Lasten bis 5 kg und erreicht Geschwindigkeiten bis 10 mm/s. Die Positionsauflösung des Einzelbeins liegt bei 40 nm; die Positionen werden mit Genauigkeiten unter 1 µm wiederholbar angefahren.
Die parallelkinematischen 6D-Positionierer werden als System inklusive leistungsfähigem Digitalcontroller und umfangreicher Softwareunterstützung angeboten. Dabei stehen zwei Varianten zur Auswahl: Einmal im Paket mit einem neuen Kompaktcontroller (255 x 226 x 185 mm), der die volle Funktionalität zu einem geringeren Systempreis zur Verfügung stellt. Weiterhin verfügbar ist das Hexapodsystem mit dem bisherigen 19-Zoll-Rackeinschub-Controller, der ab sofort standardmäßig die Ansteuerung von zwei weiteren einzelnen Servoachsen bietet. Optional können hier zusätzlich Piezosysteme sowie optische oder analoge Eingänge angeschlossen werden.
Die Ansteuerung erfolgt über TCP/IP-Ethernet oder seriell über RS-232 Schnittstelle. Alle (Ziel-) Positionen werden bequem in kartesischen Koordinaten angegeben.
Parallelkinematische Systeme haben einige Vorteile gegenüber gestapelten Mehrachspositionierern. So wirken alle sechs Aktoren auf eine gemeinsame Plattform, wodurch die bewegte Masse gering ist. Außerdem gibt es hier keine Aufsummierung von Führungsfehlern und Verkippungen einzelner Achsen. Der per Softwarebefehl frei definierbare Drehpunkt bleibt unabhängig von der Bewegung erhalten.
Der H-811 bietet Stellwege bis zu 35 mm in der XY-Ebene und bis zu 13 mm in Z-Richtung. Insbesondere die großen Kippwinkel von 20° um X- und Y-Achse und bis zu 40° um die Senkrechte machen diesen Hexapod so vielseitig. Der Mini-Hexapod positioniert zuverlässig Lasten bis 5 kg und erreicht Geschwindigkeiten bis 10 mm/s. Die Positionsauflösung des Einzelbeins liegt bei 40 nm; die Positionen werden mit Genauigkeiten unter 1 µm wiederholbar angefahren.
Die parallelkinematischen 6D-Positionierer werden als System inklusive leistungsfähigem Digitalcontroller und umfangreicher Softwareunterstützung angeboten. Dabei stehen zwei Varianten zur Auswahl: Einmal im Paket mit einem neuen Kompaktcontroller (255 x 226 x 185 mm), der die volle Funktionalität zu einem geringeren Systempreis zur Verfügung stellt. Weiterhin verfügbar ist das Hexapodsystem mit dem bisherigen 19-Zoll-Rackeinschub-Controller, der ab sofort standardmäßig die Ansteuerung von zwei weiteren einzelnen Servoachsen bietet. Optional können hier zusätzlich Piezosysteme sowie optische oder analoge Eingänge angeschlossen werden.
Die Ansteuerung erfolgt über TCP/IP-Ethernet oder seriell über RS-232 Schnittstelle. Alle (Ziel-) Positionen werden bequem in kartesischen Koordinaten angegeben.
Parallelkinematische Systeme haben einige Vorteile gegenüber gestapelten Mehrachspositionierern. So wirken alle sechs Aktoren auf eine gemeinsame Plattform, wodurch die bewegte Masse gering ist. Außerdem gibt es hier keine Aufsummierung von Führungsfehlern und Verkippungen einzelner Achsen. Der per Softwarebefehl frei definierbare Drehpunkt bleibt unabhängig von der Bewegung erhalten.